Exercise 4.1 - Dynamic Term Computations
In this exercise you will setup functions to compute the dynamics terms of the lagrange formulation for a threelink manipulator.

| Link | Mass [kg] | Link width [m] | Link height [m] | Link length [m] | Center of mass [m] |
| 1 | 5 | 0.1 | 0.1 | 0.3 | 0.15 |
| 2 | 3 | 0.1 | 0.1 | 0.5 | 0.25 |
| 3 | 3 | 0.1 | 0.1 | 0.5 | 0.25 |
The manipulator can be modeled using these DH parameters:
| Link | a [m] | alpha | d [m] | theta |
| 1 | 0.3 | \(\displaystyle \frac{\pi }{2}\) | 0.2 | \(\displaystyle q_1\) |
| 2 | 0.5 | 0 | 0 | \(\displaystyle q_2\) |
| 3 | 0.5 | 0 | 0 | \(\displaystyle q_3\) |
For this tutorial only consider the three bar links.
You can compute their inertia as follows:
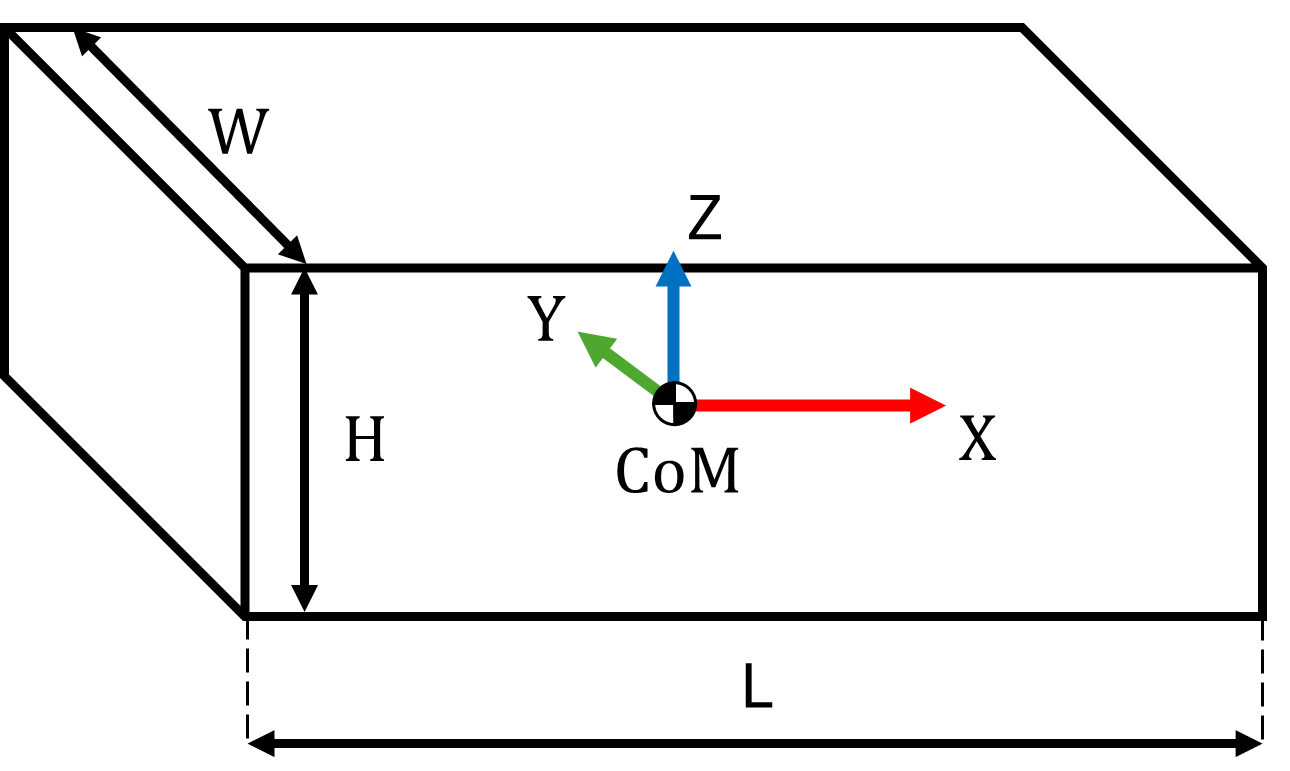
$$ I_{\textrm{xx}} =\frac{1}{12}\cdot \;m\cdot \left(w^2 +h^2 \right) $$
$$ I_{\textrm{yy}} =I =\frac{1}{12}\cdot \;m\cdot \left(w^2 +h^2 \right) $$
$$ I_{\textrm{zz}} =\frac{1}{12}\cdot \;m\cdot \left(w^2 +L^2 \right) $$
Task 1: Setup
Calculate the inertias for the links in their Center of Mass and store them in the variables:
- I1
- I2
- I3
Setup a symbolic array q containing the following real symbolic variables for the joint angles
- q1
- q2
- q3
Setup a symbolic array qd containing the following real symbolic variables for the joint velocities
- qd1
- qd2
- qd3
I1 = []; I2 = []; I3 = []; q = []; qd = [];
You can check your work by clicking the Run:
check_exercise('4-1-1')
Task 2: Setup the Robot
Load the urdf file for the threelink manipulator by using
- importrobot("threelink_noInertia.urdf")
Store it in the variable
- threelink
- Set set the gravity to \(\left\lbrack \begin{array}{c} 0\newline 0\newline -9\ldotp 81 \end{array}\right\rbrack\)
- Set the Inertias in the correct frame
- Set the center of mass for each body
hint: remember to use the parallel axis shift
threelink = [];
You can check your work by clicking the Run:
check_exercise('4-1-2')
Task 3: Inertia Matrix
Build the Inertia matrix for the three link manipulator using the symbolic toolbox.
Store the matrix in the variable
- B ( B should depend on q1, q2, q3)
B = 0;
You can check your work by clicking the Run:
check_exercise('4-1-3')
Task 3: Coriolis Matrix
Build the Coriolis matrix for the three link manipulator using the symbolic toolbox.
Store the matrix in the variable
- C ( C should depend on q1, q2, q3, qd1, qd2, qd3)
C = 0;
hint: in Case you verify your matrice yourself, remember that the toolbox function velocityProduct returns C*qd
You can check your work by clicking the Run:
check_exercise('4-1-4')
Task 5: Gravity Compensation
Build the Gravity compensation term for the three link manipulator using the symbolic toolbox.
Store the matrix in the variable
- G (G should depend on q1, q2, q3)
G = 0;
You can check your work by clicking the Run:
check_exercise('4-1-5')