clear all;
Exercise 3.2 - Inverse Kinematic Algorithm
In this exercise you will setup an inverse kinematics algorithm using the pseudoinverse of the jacobian.
Consider this UR3e robot:
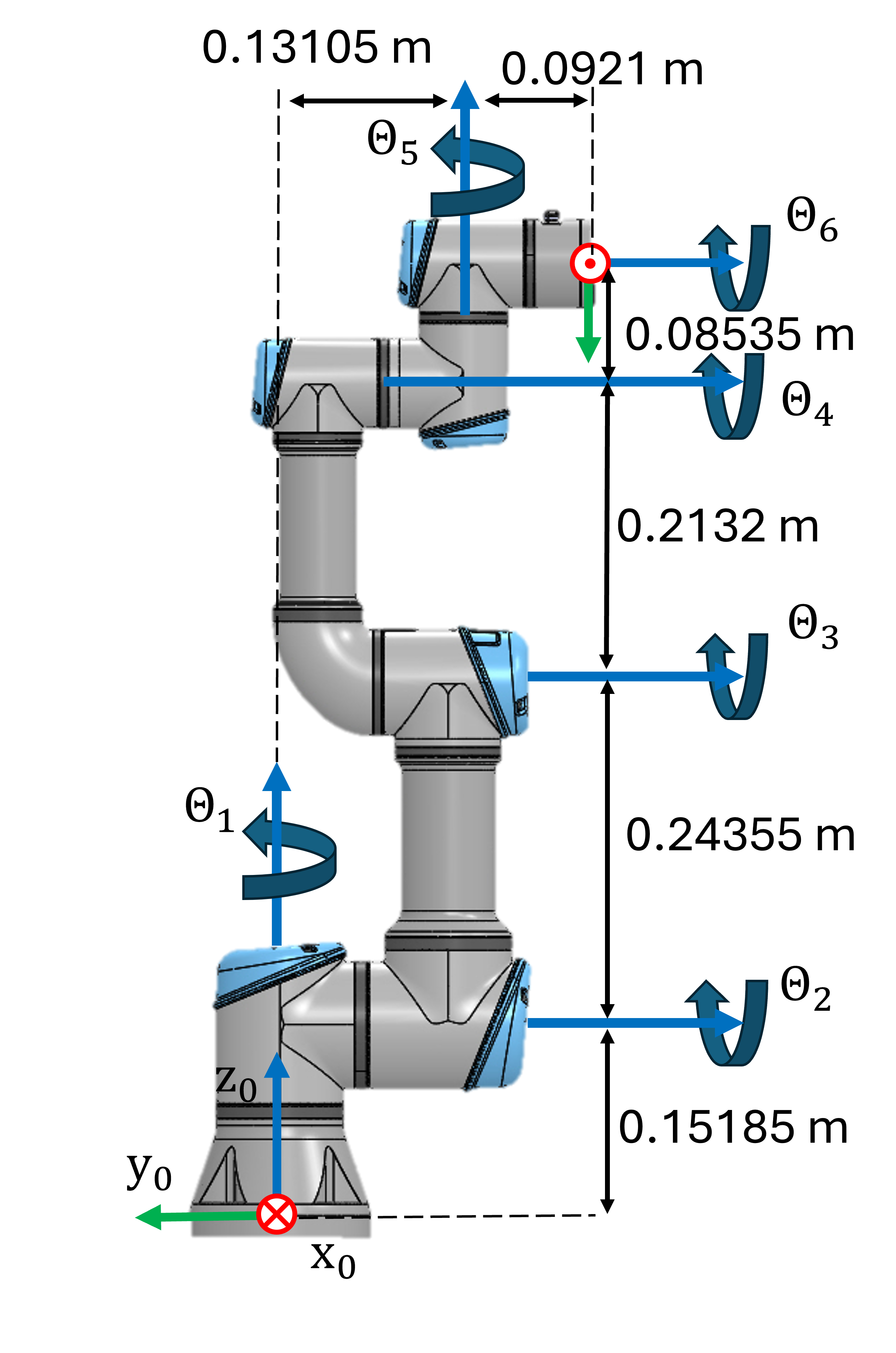
Consider this DH table for the UR3e:
| Link | a [m] | alpha | d [m] | theta |
| 1 | 0 | pi/2 | 0.15185 | q1 |
| 2 | -0.24355 | 0 | 0 | q2 |
| 3 | -0.2132 | 0 | 0 | q3 |
| 4 | 0 | pi/2 | 0.13105 | q4 |
| 5 | 0 | -pi/2 | 0.08535 | q5 |
| 6 | 0 | 0 | 0.0921 | q6 |
The control scheme you have to implement is:

where \(k\left(\cdot \right)\) is the forward kinematic of the q.
Task 1
Write a function that computes a solution to the inverse kinematic using the pseudoinverse of the Jacobian. The function has the following inputs:
- the initial joint states as a row vector ( \(q_0 \in {\mathbb{R}}^{6\textrm{x1}}\) )
- desired position vector (only considering cartesian position) \(x_{\textrm{desired}} =\left\lbrack \begin{array}{c} x\newline y\newline z \end{array}\right\rbrack\)
- gain (k)
- tolerance (tol)
- max iterations (Imax)
The function should return the required joint states as a row vector ( \(q\in {\mathbb{R}}^{6\textrm{x1}}\) )
For this task, consider \(\dot{x_d } =\left\lbrack \begin{array}{c} 0\newline 0\newline 0 \end{array}\right\rbrack\) and \(\Delta t=0\ldotp 01\;s\)
Use the following function name for your solution:
- PseudoInverseAlgorithm(q0, x_desired, k, tol, Imax)
You may use the function below to compute the symbolic transform from the base to the endeffector.
- dh2tf()
Solve this exercise without using the function:
- inverseKinematics()
DH =
function q = PseudoInverseAlgorithm(q0, x_desired, k, tol, Imax) syms q1 q2 q3 q4 q5 q6 real DH=[ %a alpha d theta 0 pi/2 0.15185 q1; -0.24355 0 0 q2; -0.2132 0 0 q3; 0 pi/2 0.13105 q4; 0 -pi/2 0.08535 q5; 0 0 0.0921 q6; ];
$$ \displaystyle \left(\begin{array}{cccc} 0 & \frac{\pi }{2} & \frac{3037}{20000} & q_1 \newline -\frac{4871}{20000} & 0 & 0 & q_2 \newline -\frac{533}{2500} & 0 & 0 & q_3 \newline 0 & \frac{\pi }{2} & \frac{2621}{20000} & q_4 \newline 0 & -\frac{\pi }{2} & \frac{1707}{20000} & q_5 \newline 0 & 0 & \frac{921}{10000} & q_6 \end{array}\right) $$
A06 = dh2tf(DH);
$$ \displaystyle \begin{array}{l} \left(\begin{array}{cccc} \cos \left(q_6 \right)\,\sigma_3 -\sigma_1 \,\cos \left(q_1 \right)\,\sin \left(q_6 \right) & -\sin \left(q_6 \right)\,\sigma_3 -\sigma_1 \,\cos \left(q_1 \right)\,\cos \left(q_6 \right) & \cos \left(q_5 \right)\,\sin \left(q_1 \right)-\sigma_4 \,\cos \left(q_1 \right)\,\sin \left(q_5 \right) & \frac{2621\,\sin \left(q_1 \right)}{20000}-\frac{4871\,\cos \left(q_1 \right)\,\cos \left(q_2 \right)}{20000}+\frac{921\,\cos \left(q_5 \right)\,\sin \left(q_1 \right)}{10000}-\frac{921\,\sigma_4 \,\cos \left(q_1 \right)\,\sin \left(q_5 \right)}{10000}+\frac{1707\,\cos \left(q_2 +q_3 \right)\,\cos \left(q_1 \right)\,\sin \left(q_4 \right)}{20000}+\frac{1707\,\sin \left(q_2 +q_3 \right)\,\cos \left(q_1 \right)\,\cos \left(q_4 \right)}{20000}-\frac{533\,\cos \left(q_1 \right)\,\cos \left(q_2 \right)\,\cos \left(q_3 \right)}{2500}+\frac{533\,\cos \left(q_1 \right)\,\sin \left(q_2 \right)\,\sin \left(q_3 \right)}{2500}\newline -\cos \left(q_6 \right)\,\sigma_2 -\sigma_1 \,\sin \left(q_1 \right)\,\sin \left(q_6 \right) & \sin \left(q_6 \right)\,\sigma_2 -\sigma_1 \,\cos \left(q_6 \right)\,\sin \left(q_1 \right) & -\cos \left(q_1 \right)\,\cos \left(q_5 \right)-\sigma_4 \,\sin \left(q_1 \right)\,\sin \left(q_5 \right) & \frac{533\,\sin \left(q_1 \right)\,\sin \left(q_2 \right)\,\sin \left(q_3 \right)}{2500}-\frac{921\,\cos \left(q_1 \right)\,\cos \left(q_5 \right)}{10000}-\frac{4871\,\cos \left(q_2 \right)\,\sin \left(q_1 \right)}{20000}-\frac{2621\,\cos \left(q_1 \right)}{20000}-\frac{921\,\sigma_4 \,\sin \left(q_1 \right)\,\sin \left(q_5 \right)}{10000}+\frac{1707\,\cos \left(q_2 +q_3 \right)\,\sin \left(q_1 \right)\,\sin \left(q_4 \right)}{20000}+\frac{1707\,\sin \left(q_2 +q_3 \right)\,\cos \left(q_4 \right)\,\sin \left(q_1 \right)}{20000}-\frac{533\,\cos \left(q_2 \right)\,\cos \left(q_3 \right)\,\sin \left(q_1 \right)}{2500}\newline \sigma_4 \,\sin \left(q_6 \right)+\sigma_1 \,\cos \left(q_5 \right)\,\cos \left(q_6 \right) & \sigma_4 \,\cos \left(q_6 \right)-\sigma_1 \,\cos \left(q_5 \right)\,\sin \left(q_6 \right) & -\sigma_1 \,\sin \left(q_5 \right) & \frac{1707\,\sin \left(q_2 +q_3 \right)\,\sin \left(q_4 \right)}{20000}-\frac{4871\,\sin \left(q_2 \right)}{20000}-\sin \left(q_5 \right)\,{\left(\frac{921\,\cos \left(q_2 +q_3 \right)\,\sin \left(q_4 \right)}{10000}+\frac{921\,\sin \left(q_2 +q_3 \right)\,\cos \left(q_4 \right)}{10000}\right)}-\frac{1707\,\cos \left(q_2 +q_3 \right)\,\cos \left(q_4 \right)}{20000}-\frac{533\,\sin \left(q_2 +q_3 \right)}{2500}+\frac{3037}{20000}\newline 0 & 0 & 0 & 1 \end{array}\right)\\mathrm{}\\textrm{where}\\mathrm{}\\;\;\sigma_1 =\sin \left(q_2 +q_3 +q_4 \right)\\mathrm{}\\;\;\sigma_2 =\cos \left(q_1 \right)\,\sin \left(q_5 \right)-\sigma_4 \,\cos \left(q_5 \right)\,\sin \left(q_1 \right)\\mathrm{}\\;\;\sigma_3 =\sin \left(q_1 \right)\,\sin \left(q_5 \right)+\sigma_4 \,\cos \left(q_1 \right)\,\cos \left(q_5 \right)\\mathrm{}\\;\;\sigma_4 =\cos \left(q_2 +q_3 +q_4 \right)\end{array} $$
q=[];
end
Task 2
Extend your function from before.
Add the input:
- dt (time for discrete algorithm step)
Add the outputs:
- total_time (time it takes for the algorithm to find a solution)
- total_iterations (iterations until the solution was found)
- solution_error (the pose square error for the solution configuration \(\left({\textrm{error}}_{\textrm{solution}} \left(q\right)={e\left(q\right)}^T \cdot e\left(q\right)\right)\) )
Use "tic" and "toc" to measure the computational time.
Use the following function name for your solution:
- ExtendedPseudoInverseAlgorithm(q0, x_desired, k, dt, tol, Imax, dt)
Solve this exercise without using the function:
- inverseKinematics()
function [q,total_time,total_iterations,solution_error] = ExtendedPseudoInverseAlgorithm(x_desired, k, dt, tol, Imax, dt) q=[]; total_time = []; total_iterations=[]; solution_error = []; end
Analyze how your algorithm behaves when you change the tolerance, gain or timestep.